Project Athena: Vision Implementation Part-I
2013-01-29
This is first post in this series. Vision Implementation.
Our image processing approach uses simple filters, morphological operation and few transforms for object detection from OpenCV library. OpenCV comes with very high level object detection and segmentation algorithms. But there is a reason why we use simple operations.
- For using high level features extractors and classifiers, the object must have considerable amount of texture. i.e corners, edges, gradients etc. in our case the ball does not have much texture on it.
- To use classifiers, the code must be trained before used to detect objects, which is a time consuming, and tedious process. iii. third and important reason is, “isn’t it enough to use simple transforms instead of complex algorithms, if the former one does the intended job”
To code then: Here is the snapshot of Work in Progress(WIP) working code. We will go block by block.
#include<stdio.h> #include<cv.h> #include<highgui.h> void cvCreateShowWindow ( char* _name, IplImage *_src ) ; IplImage* hsv_from_rgb ( IplImage* _src ) ; IplImage* hsv_threshold ( IplImage* _hsv_src, CvScalar _min, CvScalar _max ) ; IplImage* hough_circles ( IplImage* _src ) ; IplImage* find_contours ( IplImage* _src ) ; int main(int argc, char* argv[]) { if ( argc < 2 ) { printf ("Error: no input image found\n" ) ; exit (1) ; } char* image = malloc ( sizeof ( argv[1][0] ) * strlen ( argv[1] ) + 1) ; strcpy ( image, argv[1] ) ; cvStartWindowThread(); IplImage* tmp = cvLoadImage ( image, CV_LOAD_IMAGE_UNCHANGED ) ; cvCreateShowWindow("tmp", tmp); /* defines the stages of processing pipeline...*/ #define CV_ATHENA_HSV_CONVERSION 1 #define CV_ATHENA_HSV_THRESHOLD 1 /* #define CV_ATHENA_ADAPTIVE_THRESHOLD 1 */ #define CV_ATHENA_SMOOTH_BEFORE_MORPH 1 #define CV_ATHENA_MORPH 1 #define CV_ATHENA_SMOOTH_BEFORE_THRESHOLD 1 #define CV_ATHENA_THRESHOLD 1 #define CV_ATHENA_SMOOTH_BEFORE_CANNY 1 #define CV_ATHENA_CANNY 1 #define CV_ATHENA_HOUGH_CIRCLES 1 /* #define CV_ATHENA_CONTOURS 1 */ #ifdef CV_ATHENA_HSV_CONVERSION IplImage* hsv_src = tmp; IplImage* hsved = hsv_from_rgb(hsv_src); cvCreateShowWindow("hsved", hsved); cvSaveImage("hsved.jpg",hsved,0); #endif /* CV_ATHENA_HSV_CONVERSION */ #ifdef CV_ATHENA_HSV_THRESHOLD IplImage* thresh_src = hsved ; IplImage* thresholded = hsv_threshold ( thresh_src, cvScalar(36, 0, 0,0), cvScalar(50, 255, 255,255) ); cvCreateShowWindow("thresholded", thresholded); cvSaveImage("thresh.jpg",thresholded,0); #endif /* CV_ATHENA_HSV_THRESHOLD*/ #ifdef CV_ATHENA_ADAPTIVE_THRESH IplImage* adaptive_src = thresholded ; IplImage* adaptive_thresh = cvCloneImage(adaptive_src) ; cvAdaptiveThreshold ( adaptive_src, adaptive_thresh, 255, CV_ADAPTIVE_THRESH_GAUSSIAN_C, CV_THRESH_BINARY, 35, 25 ); cvCreateShowWindow("adaptive_thresh", adaptive_thresh); cvSaveImage("adaptive_thresh.jpg",adaptive_thresh,0); #endif /* CV_ATHENA_ADAPTIVE_THRESH*/ #ifdef CV_ATHENA_SMOOTH_BEFORE_MORPH IplImage* smooth_src_morph = thresholded; IplImage* smoothed_morph = cvCloneImage (smooth_src_morph); cvSmooth ( smooth_src_morph, smoothed_morph, CV_GAUSSIAN, 21, 21, 0, 0 ); cvCreateShowWindow("smoothed_morph", smoothed_morph); cvSaveImage("smoothed_morph.jpg",smoothed_morph,0); #endif /* CV_ATHENA_SMOOTH_1*/ #ifdef CV_ATHENA_MORPH IplImage* morph_src = smoothed_morph; IplImage* morphed = cvCloneImage(morph_src); IplImage* morph_tmp = cvCloneImage(morph_src); int mask_strength = 14 ; cvMorphologyEx ( morph_src,morphed,morph_tmp, NULL,CV_MOP_OPEN,mask_strength ); /* cvMorphologyEx ( morphed, morphed, morph_tmp, NULL,CV_MOP_CLOSE,2 ); */ cvCreateShowWindow("morphed", morphed); cvSaveImage("morphed.jpg",morphed,0); #endif /* CV_ATHENA_MORPH*/ #ifdef CV_ATHENA_SMOOTH_BEFORE_THRESHOLD IplImage* smooth_src_thresh = morphed; IplImage* smoothed_thresh = cvCloneImage (smooth_src_thresh); cvSmooth ( smooth_src_thresh, smoothed_thresh, CV_GAUSSIAN, 21, 21,0,0 ); cvCreateShowWindow("smoothed_thresh", smoothed_thresh); cvSaveImage("smoothed_thresh.jpg",smoothed_thresh,0); #endif /* CV_ATHENA_SMOOTH_BEFORE_THRESHOLD*/ #ifdef CV_ATHENA_THRESHOLD IplImage* bin_thresh_src = smoothed_thresh ; IplImage* bin_threshed = cvCloneImage (bin_thresh_src ); cvThreshold ( bin_thresh_src, bin_threshed, 120, 255, CV_THRESH_BINARY ); cvCreateShowWindow("bin_threshed", bin_threshed); cvSaveImage("bin_threshed.jpg",bin_threshed,0); #endif /* CV_ATHENA_THRESHOLD */ #ifdef CV_ATHENA_SMOOTH_BEFORE_CANNY IplImage* smooth_src_hough = bin_threshed; IplImage* smoothed_hough = cvCloneImage (smooth_src_hough); cvSmooth ( smooth_src_hough, smoothed_hough, CV_GAUSSIAN, 71, 71, 0, 0 ); cvCreateShowWindow("smoothed_hough", smoothed_hough); cvSaveImage("smoothed_hough.jpg",smoothed_hough,0); #endif /* CV_ATHENA_SMOOTH_BEFORE_CANNY*/ #ifdef CV_ATHENA_CANNY IplImage* canny_src = smoothed_hough ; IplImage* canny = cvClone ( canny_src ); cvCanny(canny_src, canny, 10, 10, 3); cvCreateShowWindow("canny", canny); cvSaveImage("canny.jpg",canny,0); #endif /* CV_ATHENA_CANNY*/ #ifdef CV_ATHENA_HOUGH_CIRCLES IplImage* hough_src = canny ; IplImage* cir = hough_circles ( hough_src ); cvCreateShowWindow("cir", cir); cvSaveImage("cir.jpg",cir,0); #endif /* CV_ATHENA_HOUGH_CIRCLES*/ #ifdef CV_ATHENA_CONTOURS IplImage* contour_src = cir ; IplImage* contoured = find_contours ( contour_src ); cvCreateShowWindow("contoured", contoured); cvSaveImage("contoured.jpg",contoured,0); #endif /* CV_ATHENA_CONTOURS*/ cvWaitKey(0); cvDestroyWindow("tmp"); cvDestroyWindow("hsved"); return 0; }/* end of main */ void cvCreateShowWindow(char* _name, IplImage *_src) { cvNamedWindow ( _name, CV_WINDOW_NORMAL ) ; cvShowImage ( _name, _src ) ; } IplImage* hsv_from_rgb(IplImage* _src) { IplImage* img = cvCloneImage ( _src ) ; cvCvtColor ( _src, img, CV_BGR2HSV ); return img; } IplImage* hsv_threshold ( IplImage* _hsv_src, CvScalar _min, CvScalar _max ) { IplImage* thresholded = cvCreateImage(cvGetSize( _hsv_src ), 8, 1 ); cvInRangeS( _hsv_src, _min, _max, thresholded ); return thresholded; } IplImage* hough_circles ( IplImage* _src ) { CvMemStorage* storage = cvCreateMemStorage(0); /* CvSeq* circles = cvHoughCircles (_src, storage, CV_HOUGH_GRADIENT, 1, _src->height/6, 100, 50,0,0 ); */ CvSeq* circles = cvHoughCircles ( _src, storage, CV_HOUGH_GRADIENT, 2, 10, 200, 100 , 50, 130 ); IplImage* cir = cvClone(_src ); cvSetZero (cir); size_t i; for ( i = 0; i < circles->total; i++) { float* p = (float*)cvGetSeqElem(circles, i); CvPoint center = cvPoint( cvRound(p[0]), cvRound(p[1]) ); int radius = cvRound(p[2]); cvCircle( cir, center, radius+10, CV_RGB(0,0,255), 2, 8, 0 ); } return cir; } IplImage* find_contours ( IplImage* _src ) { CvMemStorage *mem = cvCreateMemStorage(0); CvSeq *contours = 0; int n = cvFindContours (_src, mem, &contours, sizeof(CvContour), CV_RETR_CCOMP, CV_CHAIN_APPROX_NONE, cvPoint(0,0) ); /* int n = cvFindContours ( gray, mem, &contours, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cvPoint (0,0) ); */ IplImage* res = cvCloneImage(_src) ; cvSetZero(res) ; for (; contours != 0; contours = contours->h_next) { cvDrawContours (res, contours, CV_RGB(255,0,0), CV_RGB(0,0,0), -1, CV_FILLED, 8, cvPoint(0,0) ); } return res; }
At present the code uses 9 of 11 stages in the pipeline. they are,
RGB to HSV conversion
the image is converted from RGB(RED-GREEN-BLUE) into HSV(HUE-SATURATIONN-VALUE) representation. easier to color based separation. The HUE value signifies the color of the objects. VALUE represents the brightness of the pixel. SATURATION represents the intensity.

RGB to HSV
HSV Thresholding
the images is converted into binary image. The pixels whose HSV values lie between the specified range will appear white and the other pixels will turn black.
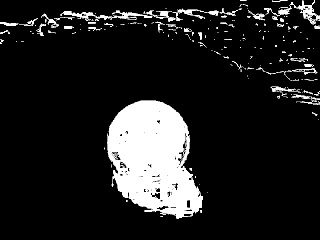 HSV-Threshold
HSV-Threshold
Smoothing
Smoothing in most cases, is done to reduce noise.
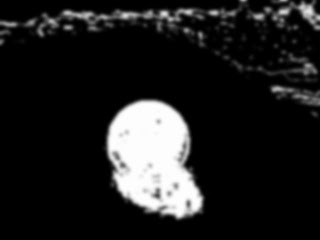
Smoothing before morphing
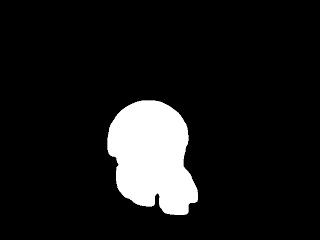
Morphing
The OPEN morphological operation is used to erode the tiny black regions. OPEN is a combination of erode and dilate operations which cleans the image a bit. Morphological Operation - OPEN

Smoothing

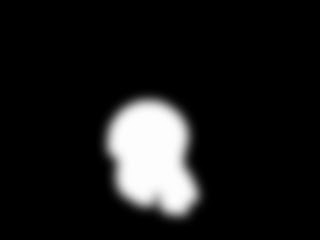
Thresholding
This stages separates the object of interset after the morphological operation. This is similar to HSV thresholding.
Smoothing
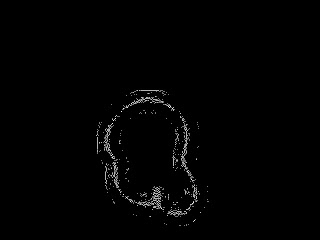
Canny edge detection
Canny edge detection, determines the boundaries of the object, and help in Circles detection using Hough Transform
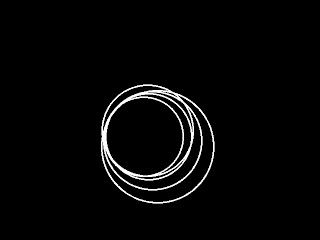
Hough Transform for Circles
find the circles present in the image. and draws them.